|
||||||||||||||||||||||||
Whitepaper: Project Beeclaw - Autonomous Agentic Control Systems for UAVs1. Executive Summary and Architectural VisionThe unmanned aerial vehicle (UAV) sector stands at a critical inflection point where deterministic automation lacks the cognitive flexibility to adapt to unstructured environments. Current flight controllers rely on rigid state machines that fail in edge cases. Project Beeclaw resolves this dichotomy by leveraging the memory safety of the **Rust** programming language for the "Bee" flight control stack and the **OpenClaw** agentic framework running on edge silicon like the Apple M4 Neural Engine. 2. Brand Identity and Biomimetic Design
"Bee" honors precise flight control and swarm intelligence, emulating wing beat frequencies (200-250 Hz) to reduce noise pollution. "Claw" represents cognitive tool use via the integrated OpenClaw framework.
3. Computation Substrate: Mac Mini M4 and Edge SiliconThe architecture bifurcates into the Flight Domain (Hard Real-Time) and the Agent Domain (Cognitive). 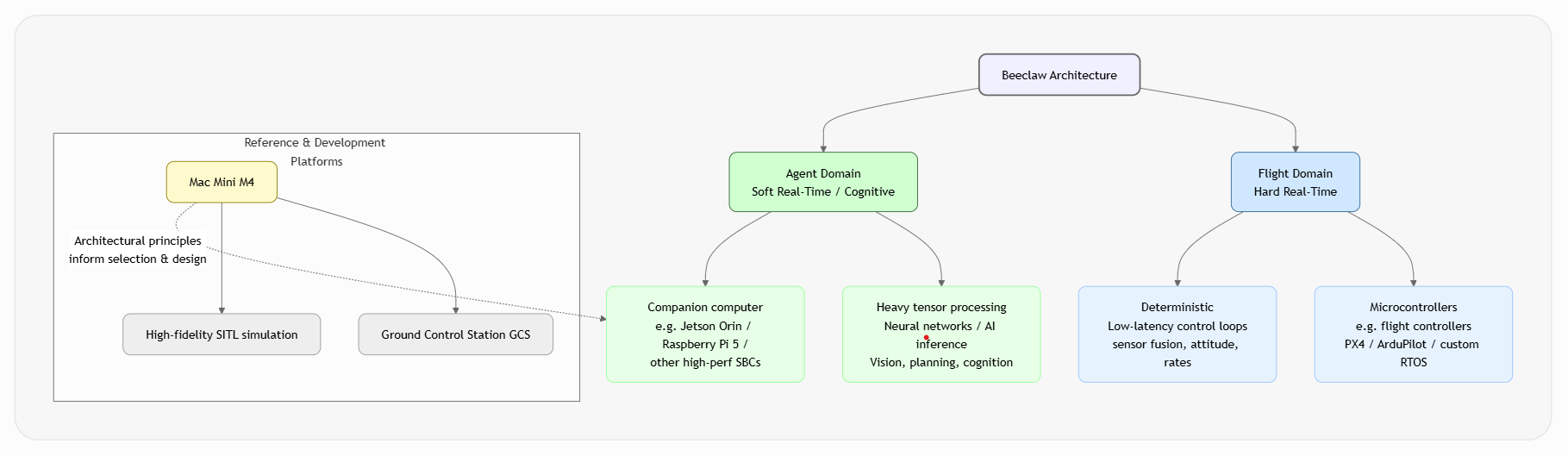
Figure 1: Beeclaw Dual-Domain Reference Architecture
4. The "Bee": Rust-Based Flight Control FirmwareBy replacing legacy C++ with Rust, the system eliminates runtime errors like memory corruption. Beeclaw utilizes the Embassy framework to bring async/await power to microcontrollers. 5. The "Claw": Agentic Intelligence FrameworkThe "Claw" provides conscious reasoning via a specialized fork of OpenClaw, enabling a drone to transform from a chatbot to a physical agent.
6. Communications: The Neural Link
7. Security and FailsafesBeeclaw implements a Reference Monitor strategy. The "Bee" firmware treats the "Claw" agent as an untrusted operator, enforcing a Hard Geofence and Kinematic Envelope. Any violation triggers an immediate failsafe hover mode. 8. Future OutlookThe roadmap includes Swarm Agency, utilizing the Zenoh pub/sub protocol to allow multiple Beeclaw units to share a distributed context for cooperative mapping. Beeclaw is a platform for the secure, autonomous interaction of software with the physical world. 9. Technical Addendum: Detailed Specifications
|